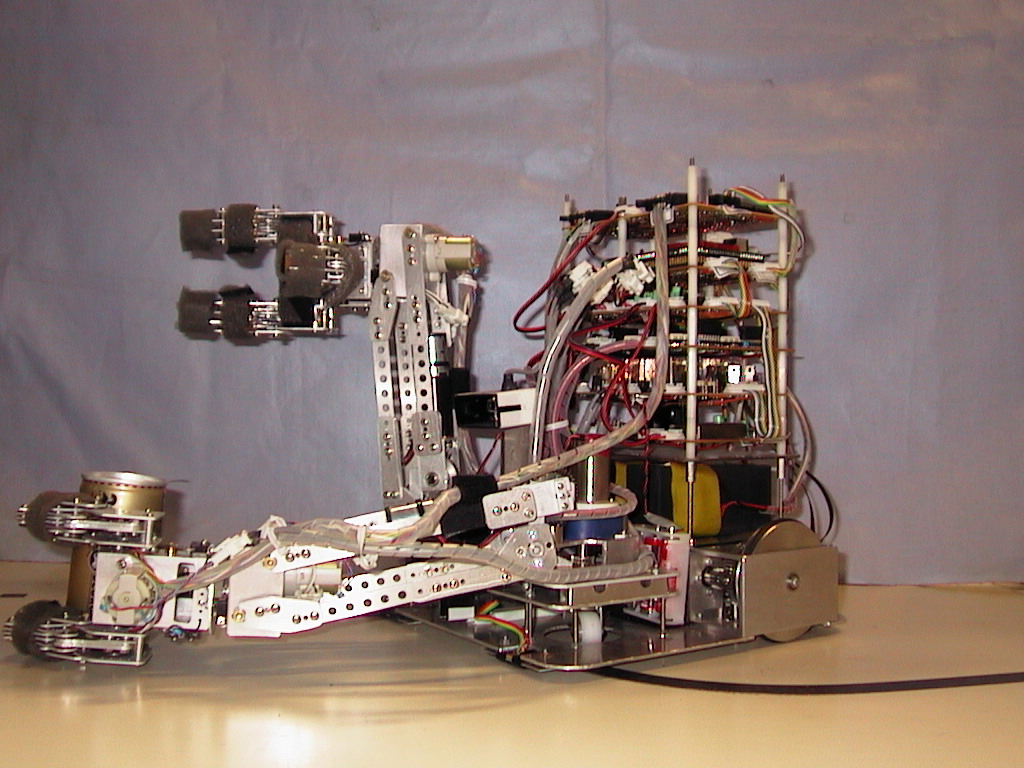
二頭竜(りゅう)
I*T*Y
東北大学大学院情報科学研究科中野研究室
自立型,単独型
長320mm×幅250mm×高300mm, 重6.5kg, 速1000mm/s
デッドレコニング, 距離センサ,
ハンド,
アピール
双腕3本指のハンド、 モータ一つで3本指の開閉を実現、 メカニカルリンクのハンドによる物体形状に沿った把持が可能
ロボットの特徴
5次関数を用いた軌道生成およびなめらかな追従、 小型計測輪による高精度な自己位置推定、 アーム部平行リンク導入による制御の簡単化、
競技結果:
一次 競技点: 20 審査点: --- 補正: 0 合計:20.00 技術: --- パフォ: --- 挑戦:---
二次 競技点: 15 審査点: 15.00 補正: 0 合計:30.00 技術: 7.75 パフォ: 7.25 挑戦:---
決勝 競技点: 20 審査点: 15.75 補正: 0 合計:35.75 技術: 8.00 パフォ: 7.75 挑戦:---