| Self-content,
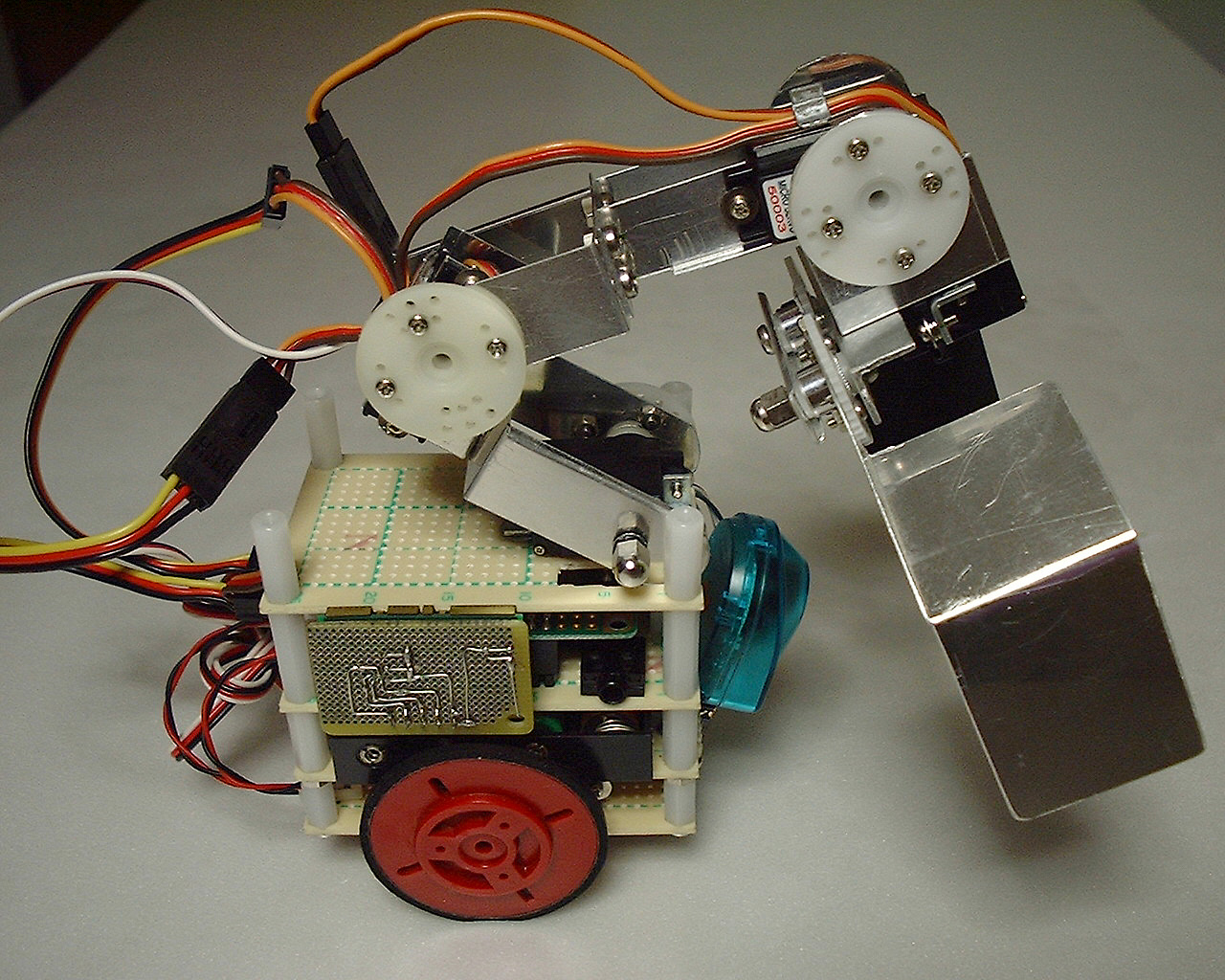
Single-robot L:230mm * W:80mm * H:120mm, ---kg, ---mm/s Line-trace, Vision sensor, Hand, Appeals: ロボットと外部 PC の間で無線通信をするために、Bluetooth モジュールを搭載しています。フリーの 8bit マイコン用 Bluetooth プロトコルスタックが無いので、インチキプロトコルスタックを自作しました。多くの人がいるロボコン会場で無事通信が行えるのか、当日実証をしたいと思います。 Characteristics: 小型のユニバーサル基板サイズに合わせて作成したロボットです。PHS 用小型カメラの画像を頼りにライントレースし、ボールを見つけます。RC サーボを用いて作成した4自由度のアームを使ってボールをつかみます。 |