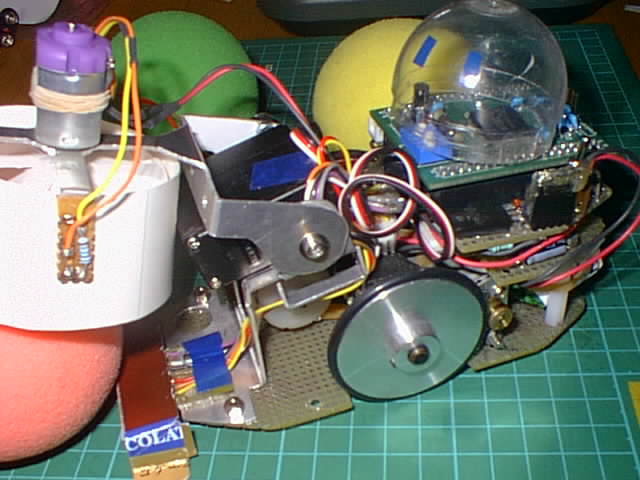
| 自立型,単独型 長150mm×幅80mm×高130mm, 重0.57kg, 速1200mm/s ライントレース, デッドレコニング, 距離センサ, アピール ボール同士が接近していても引っかかったりすることのないようにするため、吸いつける方式に落ち着きました。単純な機構ながら、位置エネルギーと反発を利用してボールを遠くまで転がすことができます。 Grabbing with a fingered robot hand may be troubled by other balls or wall. So I chose the simplest and assured way. The robot can shoot a ball; rolls a ball to a long distance, using potential energy and bounce of the ball itself. ロボットの特徴 左右の車輪を独立に駆動して走行します。モーターにはDCモーターを使用し、ロータリーエンコーダーによってロボットの進んだ距離及び向きを検出します。 ガイドラインの方向、ロボットの向き、前後位置などに対してPID制御を行うことで走行します。 プロペラファンでボールを吸い付けて運びます。 CMOSカメラでボールの色を判別します。 Moves with 2 wheels, driven by 2 DC motors. Calculates robot's direction and position with 2 rotary encoders. A propeller is used to catch a ball, like a vacuum cleaner. Discremenates color of balls with CMOS camera. |