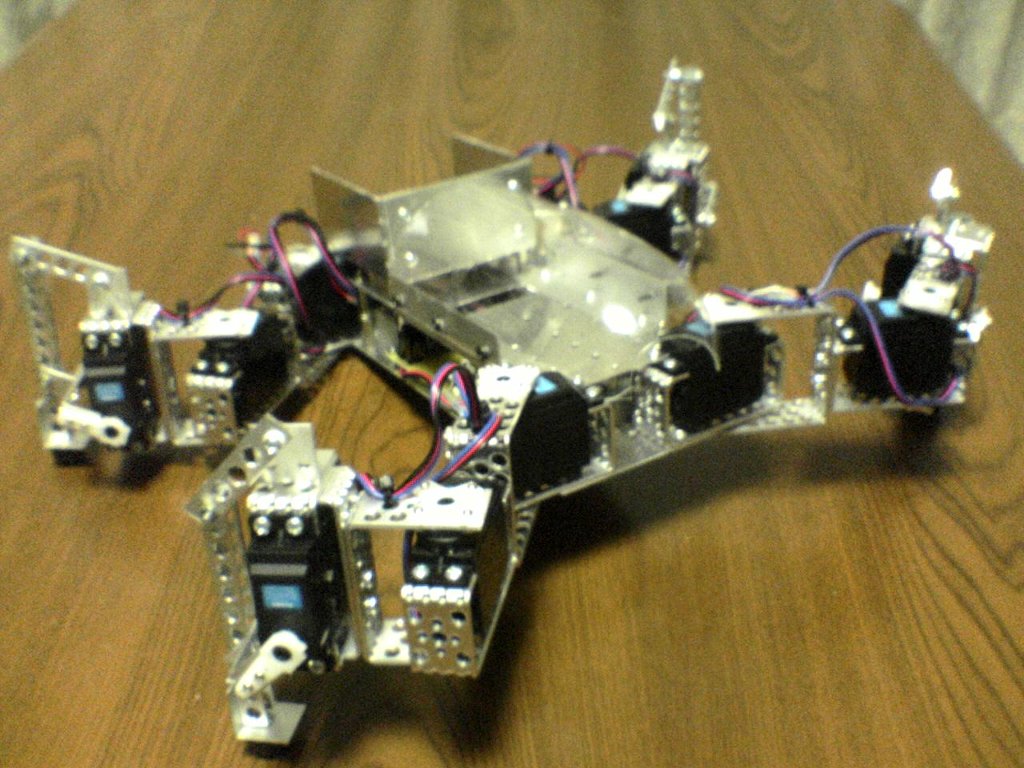
| 自立型,単独型 長200mm×幅440mm×高140mm, 重1.6kg, 速80mm/s ライントレース, デッドレコニング, 距離センサ, アピール ボールによる得点は度外視し、パフォーマンスに重点を置きました。 ロボット自体にはかわいげは無いのですが、4足ならではのダンスをします。 普通科高校生一人でロボット作りをするのは非常に大変でした。 この無謀ともいえるチャレンジ精神を評価していただければ幸いです。 ロボットの特徴 自由度3の足を4本もった自由度計12の自立型歩行ロボット。 アクチュエータはラジコン用サーボであるsx101。 歩行モーションはエクセルであらかじめ計算しておいたデータをマイコンのROMに書き込んでおき、ロボットが必要に応じて判断したデータをロード、足を動かす。 12chのサーボの制御をPICで行う。 前面に物体との距離を測定するPSDセンサを搭載。 足にはタッチセンサとライン検出赤外線センサを搭載。 フィールド中央にある段差を乗り越えることに挑みます。 ボールを拾う機構を装備していないので、得点は自由ボールのみです。 そのかわり4足歩行である利点を生かしたパフォーマンスを行います。 |