| Self-content,
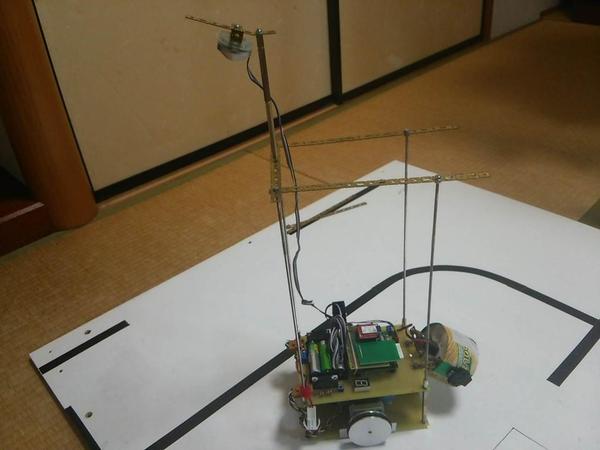
Multi-robots L:250mm * W:150mm * H:300mm, ?kg, ?mm/s Vision sensor, Appeals: ロボットの構成は、足回りのステッピングモーター2つを含む合計3個、センサはカメラ1つを含む合計2個と、今現状考えられる最低限の構成を目指して作りました。 その結果、画像認識で動くロボットを合計2万円程度で作ることができました。 また、最低限の構成を目指したため、材料がそろっているならば、同じロボットをクローンするのに部品加工を含めて12hほどでできるほど単純なつくりとなっています。 Characteristics: 本ロボットは、ライントレース、ボールの探索、色判別をすべてカメラからの画像をマイコンで画像認識をし実施しています。 ボールの取得・保持は、筒の中でファンを高速回転することにより吸い寄せる仕組みとなります。 |