| Self-content,
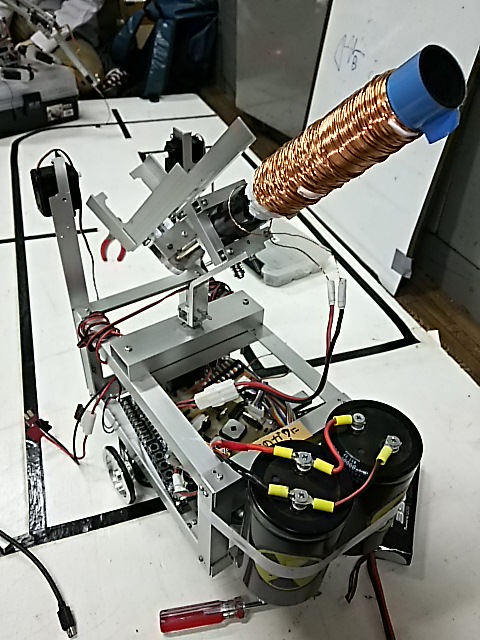
Single-robot L:260mm * W:150mm * H:350mm, 3kg, 160mm/s Line-trace, Dead-reconing, Distance sensor, Sensors using lightwave, Appeals: 発射機構にコイルガン使用(予定) Characteristics: FPGAを使用し、オドメトリを用いて現在位置と角度の計算を行う。 また、ボールを発射する(予定)。 |
|
|
Revival Game: 0.00, Judge: ---, Compensation: 0, Sum.:0.00
Performance: --- Challenge: --- Art:--- Speed :---
2nd Pre.round Game: 5.00, Judge: 25.67, Compensation: 0, Sum.:30.67
Performance: 10.00 Challenge: 6.34 Art:5.00 Speed :4.34