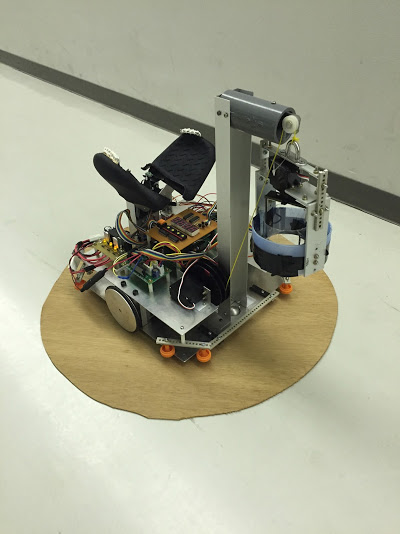
| 自立型,単独型 長390mm×幅285mm×高420mm, 重4.75kg, 速800mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, ハンド, アピール ペットボトルをとる機構に苦労しました。 ロボットの特徴 缶やボールをとるアーム、ペットボトルをとるアームの二つに分けております。 缶やボールをとる方はハンドの部分にシリコン製のカバーを取り付け摩擦を増やしてあるため缶がどの状態でもとれるように工夫しております。ペットボトルをとるアームは360°回転をするサーボを使い、滑車のようにしてハンドをおろしてペットボトルをとります。 |