| Self-content,
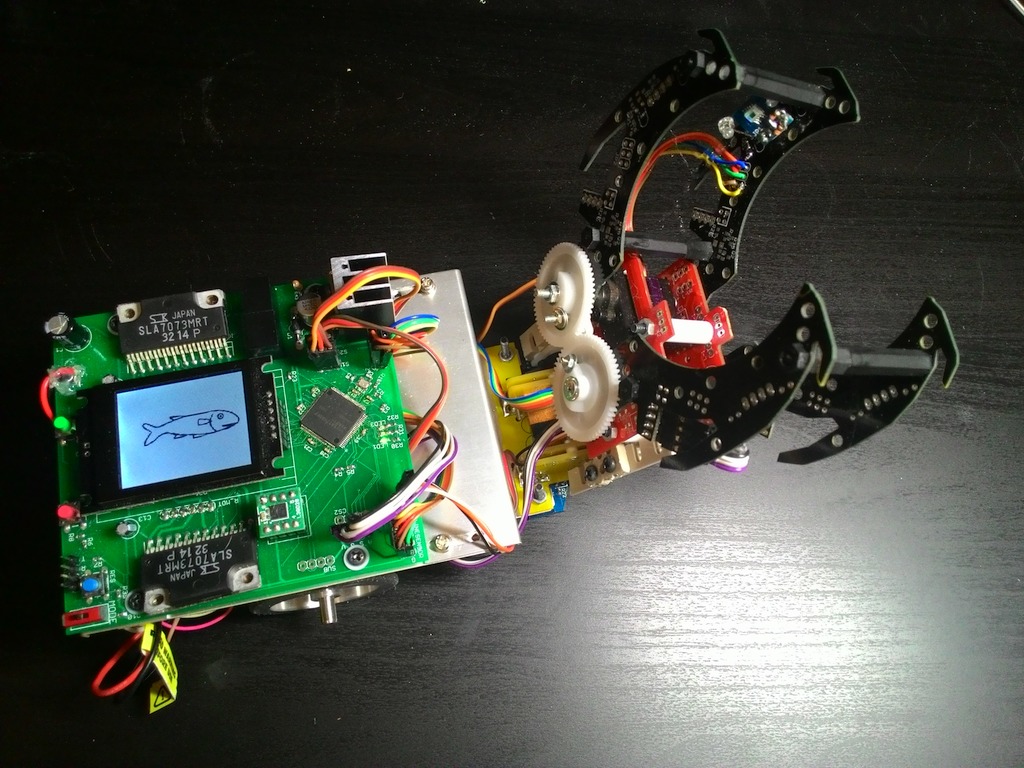
分離合体型 L:200mm * W:130mm * H:160mm, 0.75kg, 1000mm/s Line-trace, Distance sensor, Hand, Appeals: 車体は貰い物の既製品を使用しています。 手元に加工機材が無い、開発費をケチりたいという理由でアーム周りの部品の大半を外注基板で作ってみました。 スタート区画から出るとき自動でラインのキャリブレーションを行っています。 ディスプレイにボールの色が画像で表示されます。 ある程度のパラメータはPC無しでマシン上で行えます。 Characteristics: ラインをトレースし移動、その後PSDセンサでボールを検出しアームでつかみ、アームについている色センサで色を判別しゴールへ運び、投げ入れます。 時間短縮の為直線では若干加速します。 |