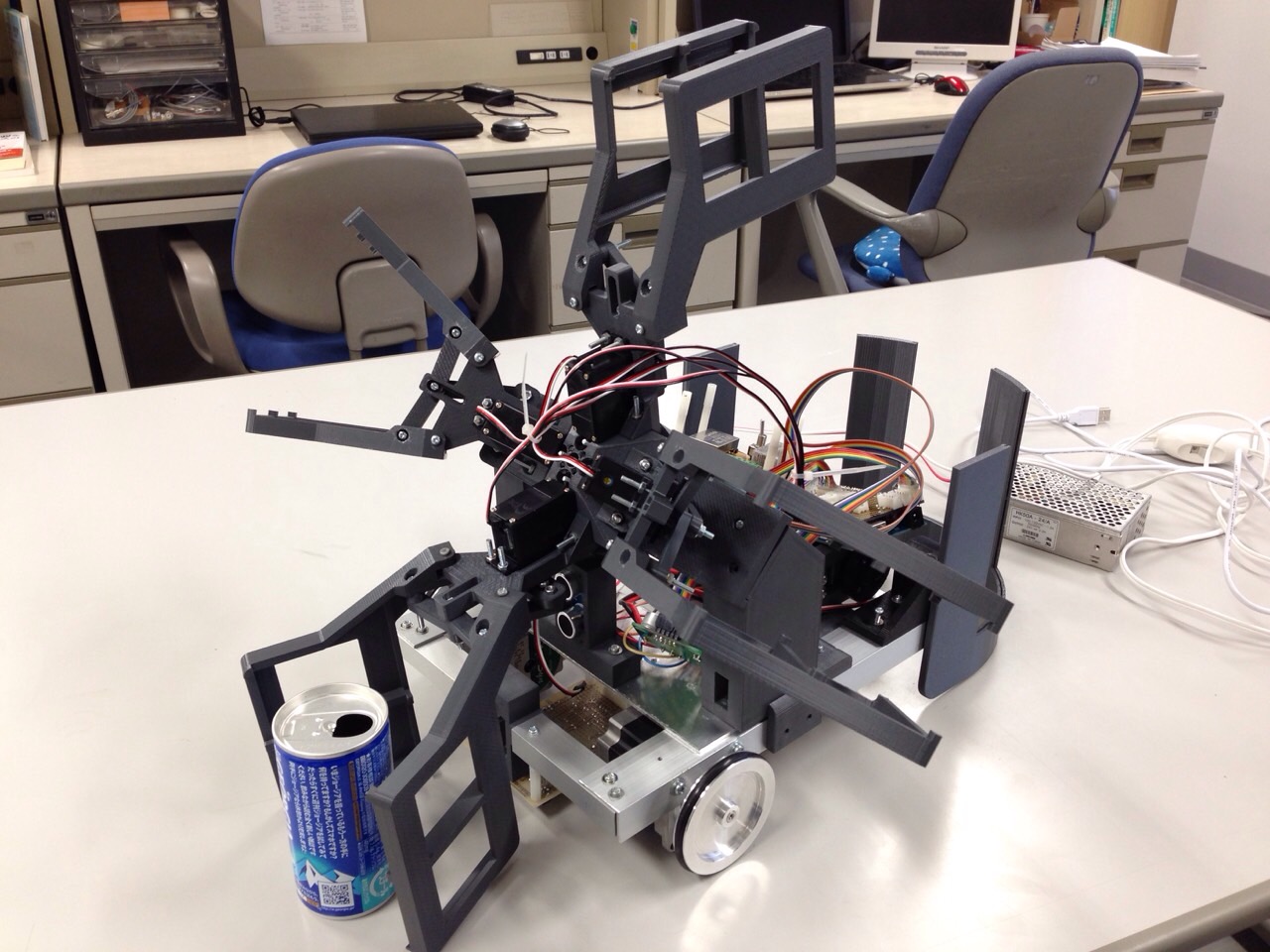
| 自立型,単独型 長440mm×幅440mm×高400mm, 重4.5kg, 速150mm/s ライントレース, 距離センサ, 光センサ, ハンド, アピール 初出場ですが頑張ります ロボットの特徴 マイコンにはArduino-mega 2560を、電源にはモバイルバッテリーと電源装置またはリチウムポリマー電池を使用しています。 足回りにはステッピングモータを用いライントレーサで黒線に沿ってボールエリアまで行き、サーボモータを用いた前部のアームと複数のハンド機構、後部の囲みによりそれぞれの対象物に合わせた拾得を行います。 対象物の識別は距離センサを高さを分けて配置し、対象物の高さと順番(エリア)によって行います。 |