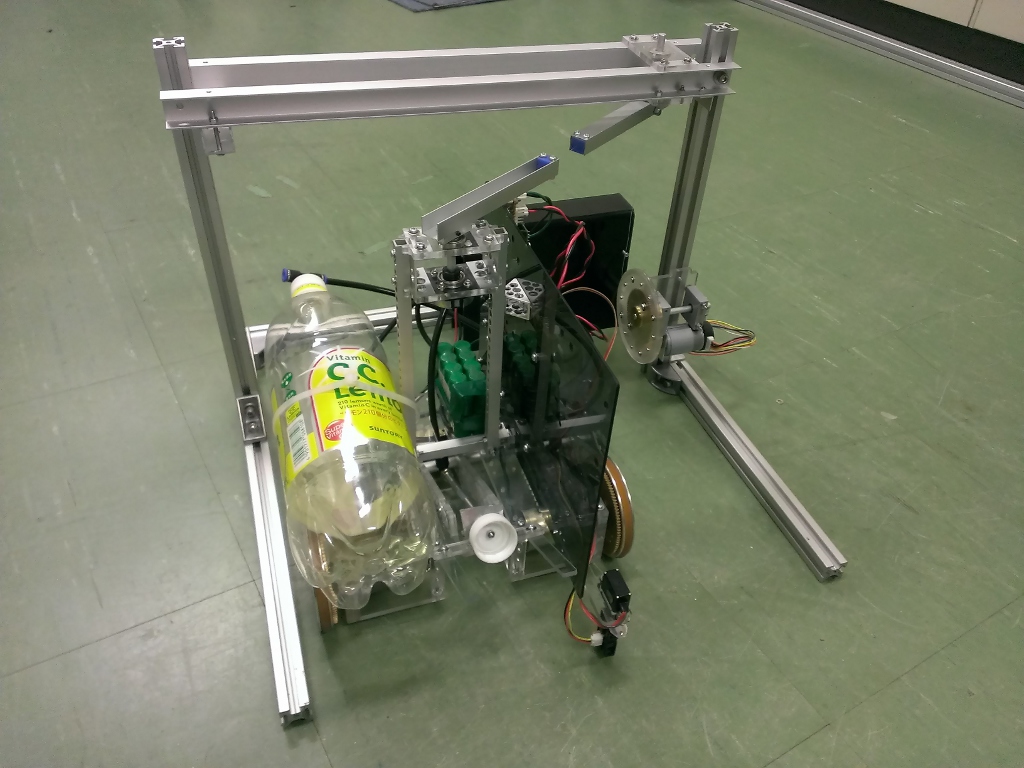
| Self-content,
Multi-robots L:445mm * W:445mm * H:350mm, 4.4kg, 150mm/s Dead-reconing, Distance sensor, Hand, Appeals: フィールドのラインに頼らない自己位置推定の手法の実現をがんばります。 Characteristics: スタートゾーンから張った糸で自己位置推定を行います。これをオドメトリと組み合わせることで確実な自己位置推定を試みます。ボールをエアシリンダでゴールへ飛ばすことで時間短縮を狙います。 |