| Self-content,
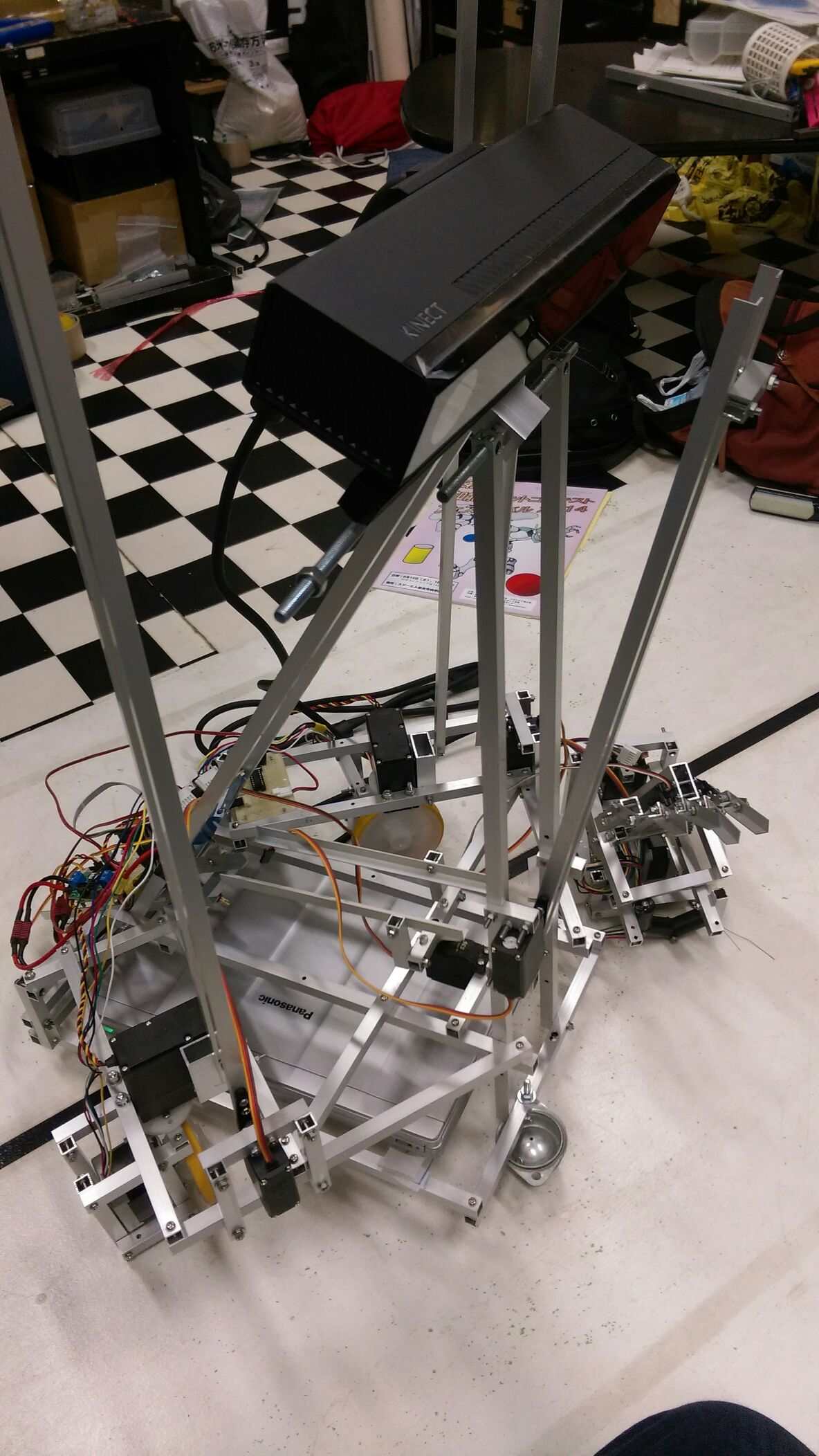
Multi-robots L:720mm * W:1260mm * H:630mm, 5kg, ∞mm/s Line-trace, Distance sensor, Vision sensor, Co-operation, Hand, Appeals: 回収用のハンドは簡単な機構で人の手の動きを目指してみました。指サックがついているのはご愛嬌。 Characteristics: 二台協調で一台がボールの運搬とKinectによる状況把握、一台がボールの回収を担当します。外側にコードを伸ばさなくてもいいようにKinectと処理用パソコンがロボット本体に搭載されています。 ロボットのうち一台は足回りがステアリングして横移動できます。 |