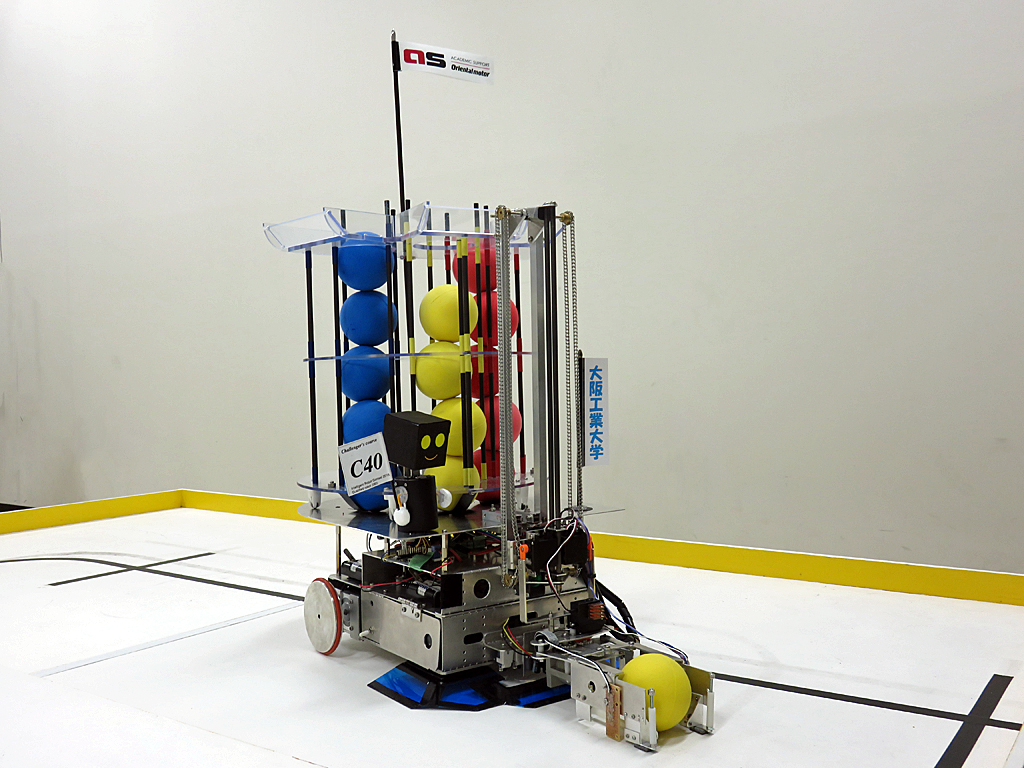
| 自立型,単独型 長435mm×幅395mm×高500mm, 重4.5kg, 速380mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, ハンド, アピール オリエンタルモータ様から賞品で頂いたステッピングモータを使用しています! 開発当初は全部回収できなかったが,度重なる改良により全てのボールを回収できるようになりました. ロボットの特徴 PSDセンサを用いてボールを探索します.探索したボールをハンドで掴み,ハンド内部で色班別を行い回収機構にボールを格納します. 2枚のH8マイコン間で通信し,分散処理をしています. |