donadona
DENKARA teamA
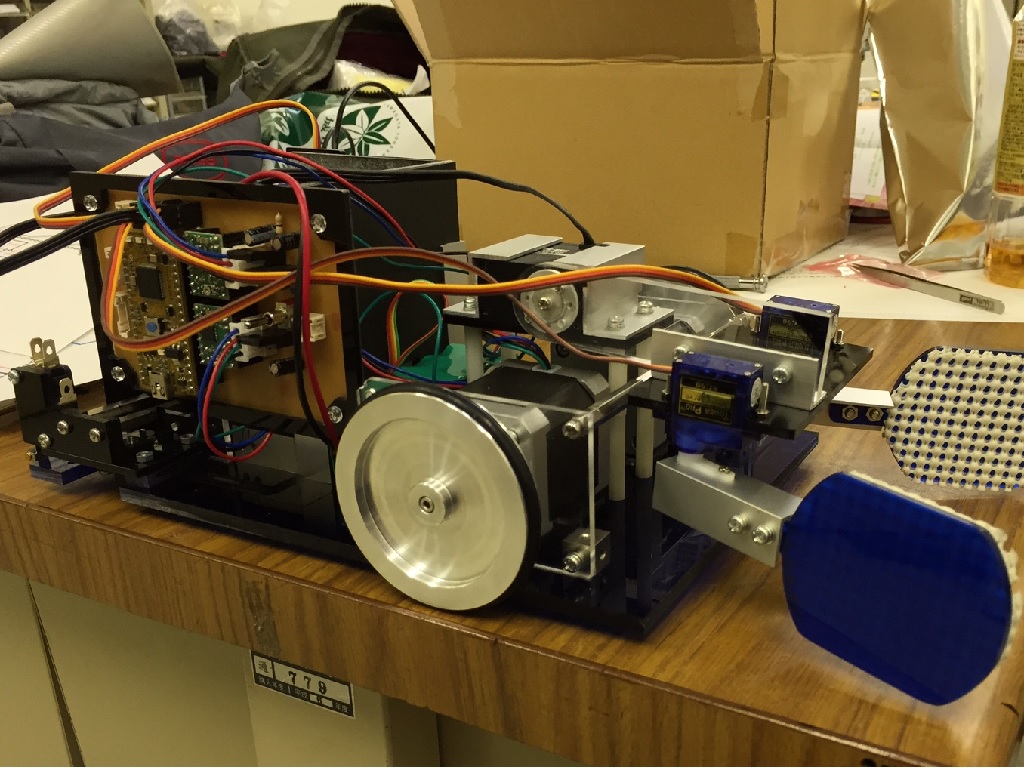
Self-content, Single-robot
L:350mm * W:165mm * H:115mm, ---kg, ---mm/s
Distance sensor,
Hand,
Appeals:
低コスト、高性能を目指して作成しました。
Characteristics:
距離センサーを用いてボールの位置を検出し、赤外線カラーセンサーでボールの色を判断しています。ボールの回収は、1つを機体にある筒(箱)に入れ、さらに1つをアームで持ちながら運びます。
Results
1st Pre.round Game: 6.00, Judge: ---, Compensation: 0, Sum.:6.00
Performance: --- Challenge: --- Art:--- Speed :---