| Self-content,
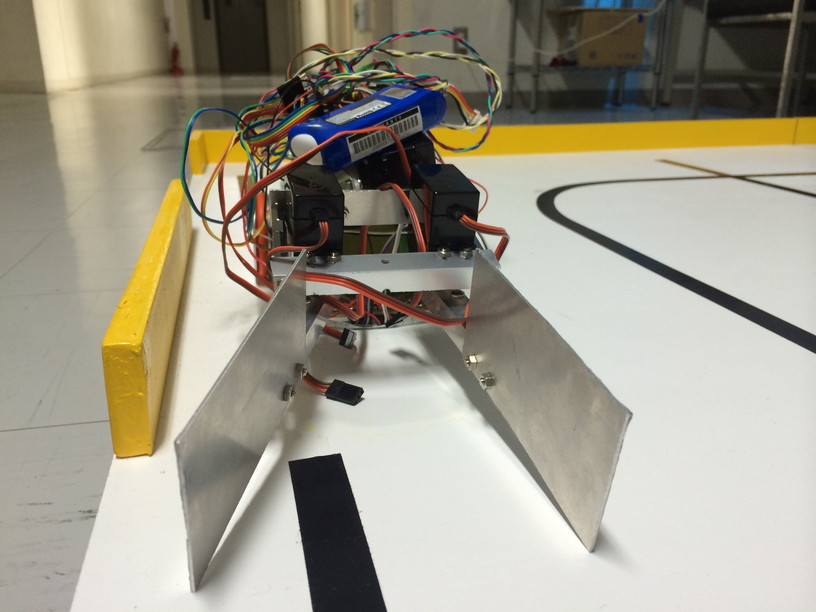
Multi-robots L:150mm * W:90mm * H:50mm, 2kg, 100mm/s Line-trace, Distance sensor, Co-operation, Appeals: なるべく複雑過ぎない作りになるように工夫した。 Characteristics: ボールを発見してアームで取り、ボールを落とすという動作を2台のロボットに行わせる。この際、ロボットの衝突を防ぐため、無線通信を用いておよその位置を互いに送信させ、受信した情報を元に衝突が起きない動作をさせる。 |