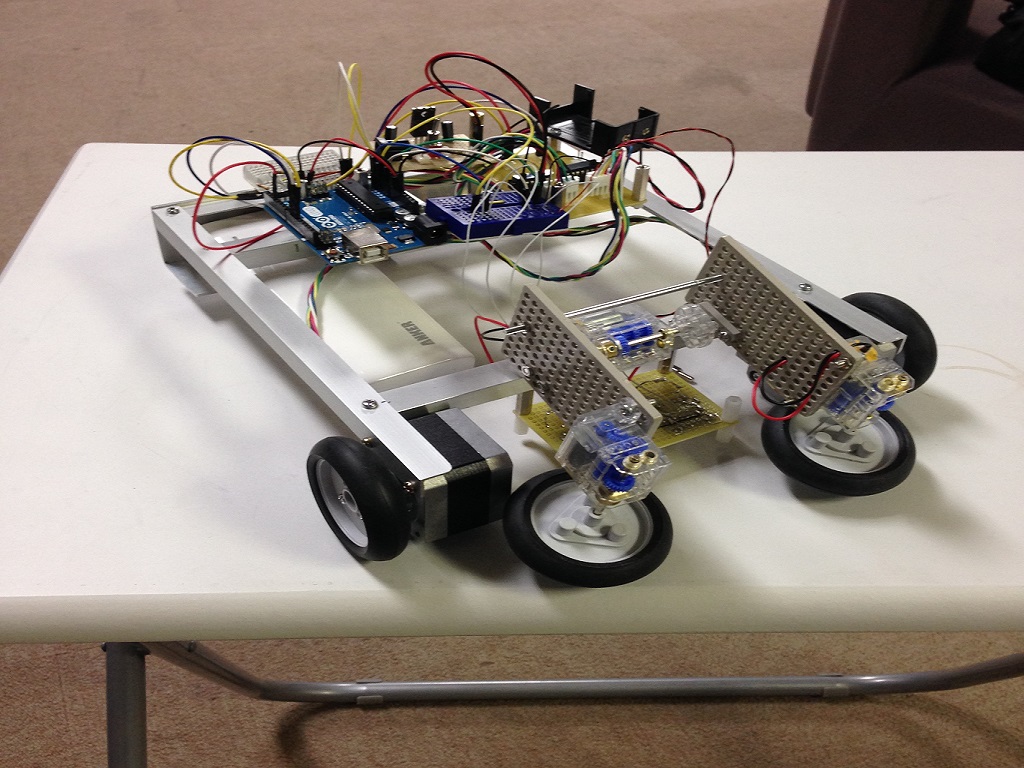
| 自立型,単独型 長250mm×幅230mm×高120mm, 重1.3kg, 速273mm/s ライントレース, 距離センサ, ビジョンセンサ, ローラ, アピール 一見地味ですが,画像処理したり,ボールを転がしたりしてロボット自身の移動距離を少なくして合理的に動かしているつもりです. ロボットの特徴 Raspberry Piで画像処理を行い、ボールの位置を特定し,それをもとにArduinoで移動しボールを捕獲します。 掴んだあとはロボットの自己位置情報とゴールの位置情報から,中央の山の上をボールが転がりゴールします. |