| Self-content,
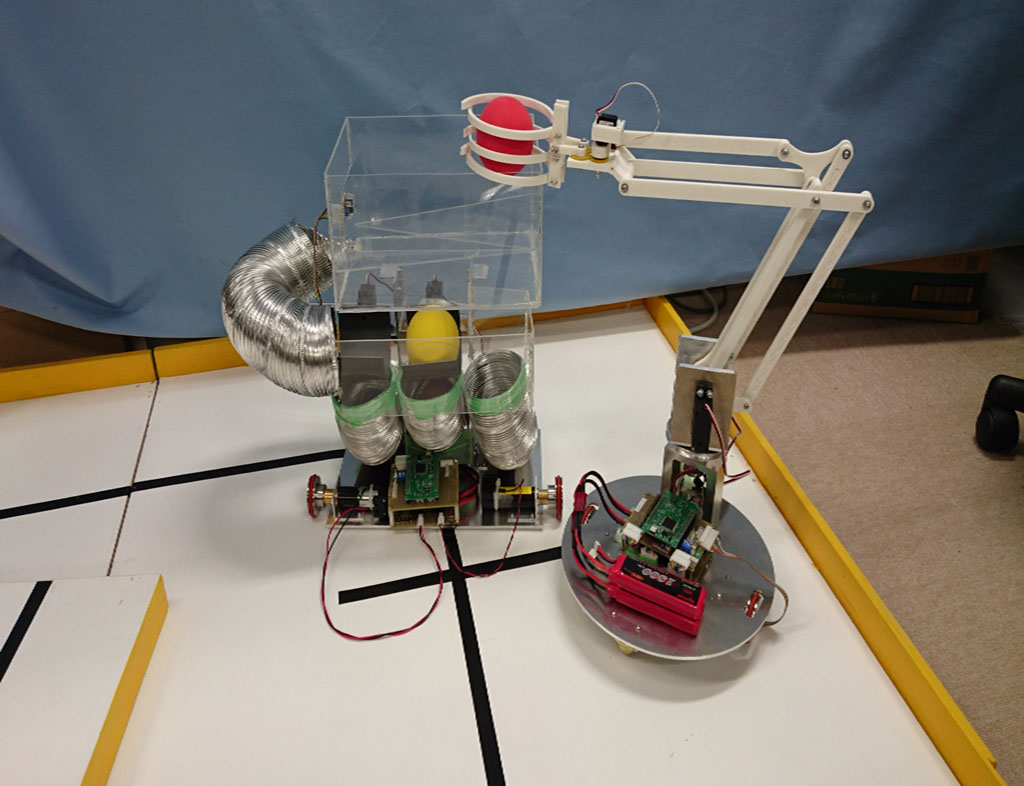
Multi-robots L:260mm * W:260mm * H:500mm, 2.7kg, 200mm/s Line-trace, Dead-reconing, Distance sensor, Co-operation, Hand, Appeals: 役割を分担し,スピードを狙いたいと思います。 Characteristics: Hello…ハンドを用いて,ボールを拾います。ハンドは常に水平になるように設計されています。 World…Helloの集めたボールの色を識別し,格納します。 ボールを格納するシリンダー上部に曲面を設置し,開閉することで振り分けます。 二台はXBeeをもちいた協調を行います。ボールエリアの手前でWorldが待ち,その位置にHelloがボールを運びます。 |