SLAM-D3
Hirasawa Lab.
 |
Self-content,
Single-robot
L:250mm * W:220mm * H:200mm,
2.0kg, 70mm/s
Dead-reconing,
Distance sensor,
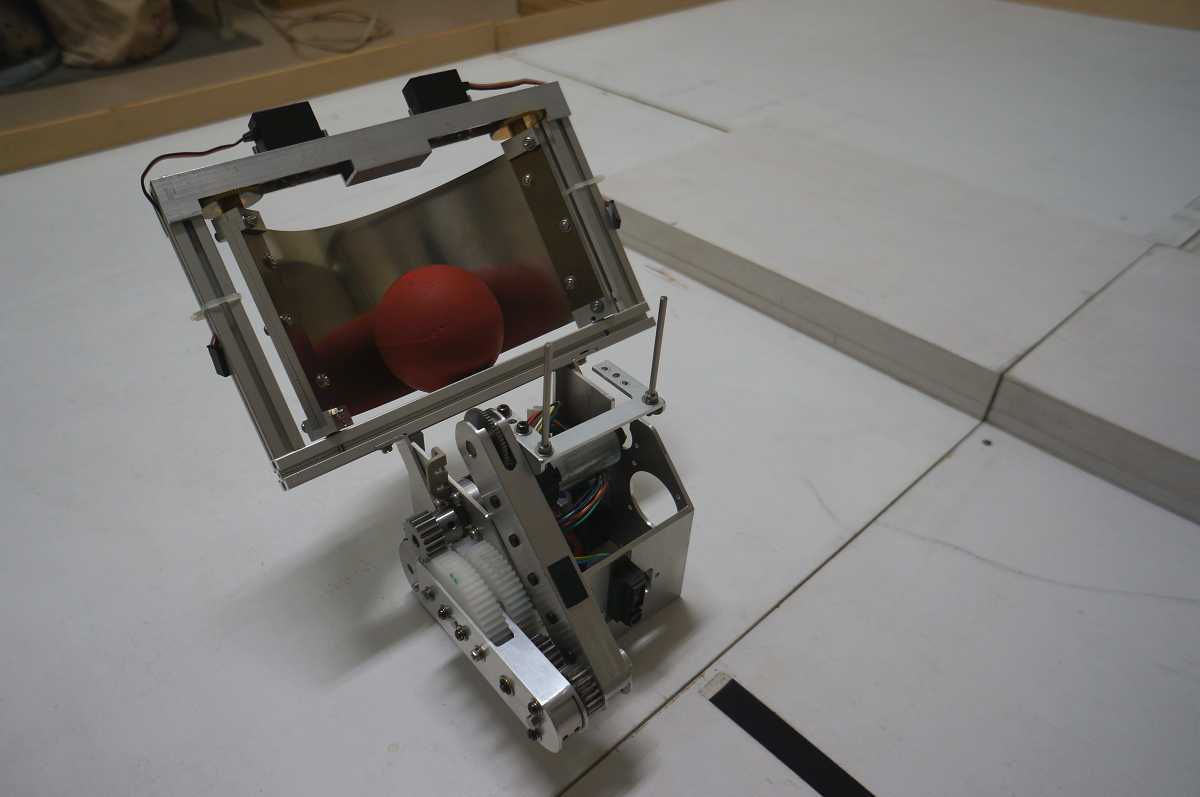
Appeals:
ボールの回収機構は2017に参加のもの.両腕にこだわらず片腕にして確実性の向上を図りました.
Characteristics:
筑波大 望山先生ご考案の『閉ループ弾性体による瞬発力発生機構』を知能ロボコンに応用してみました.シンプルな機構でエネルギの蓄積と解放を行うことができます.
| |
Results
1st Pre.round Game: 5.00, Judge: ---, Compensation: ---, Sum.:5.00
Performance: --- Challenge: --- Art:--- Speed :---
Revival Game: 5.00, Judge: ---, Compensation: ---, Sum.:5.00
Performance: --- Challenge: --- Art:--- Speed :---
2nd Pre.round Game: 5.00, Judge: 30.67, Compensation: ---, Sum.:35.67
Performance: 11.34 Challenge: 7.00 Art:6.67 Speed :5.67