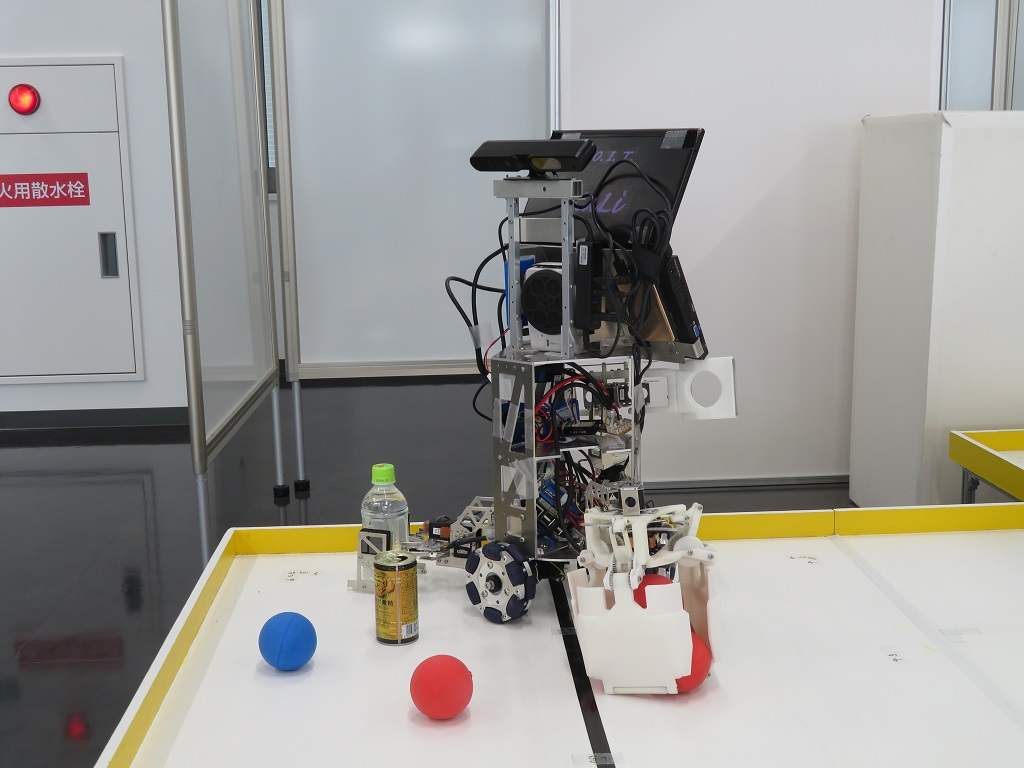
| 自立型,単独型 長445mm×幅445mm×高617mm, 重4kg, 速250mm/s デッドレコニング, ビジョンセンサ, ハンド, アピール ボールピラミッドや倒れた缶など対象物ごとにハンドを使い分けます. ロボットの特徴 Laser Range Finder(LRF)を用いた自己位置の修正をします! (ライントレースを使用しません) オムニホイールを用いた全方向移動台車による物体の回収が見ものです. 物体の認識(角度推定含む)は,RGB-Dセンサのポイントクラウドデータを独自のアルゴリズムで処理することによって,行っています. |