| Self-content,
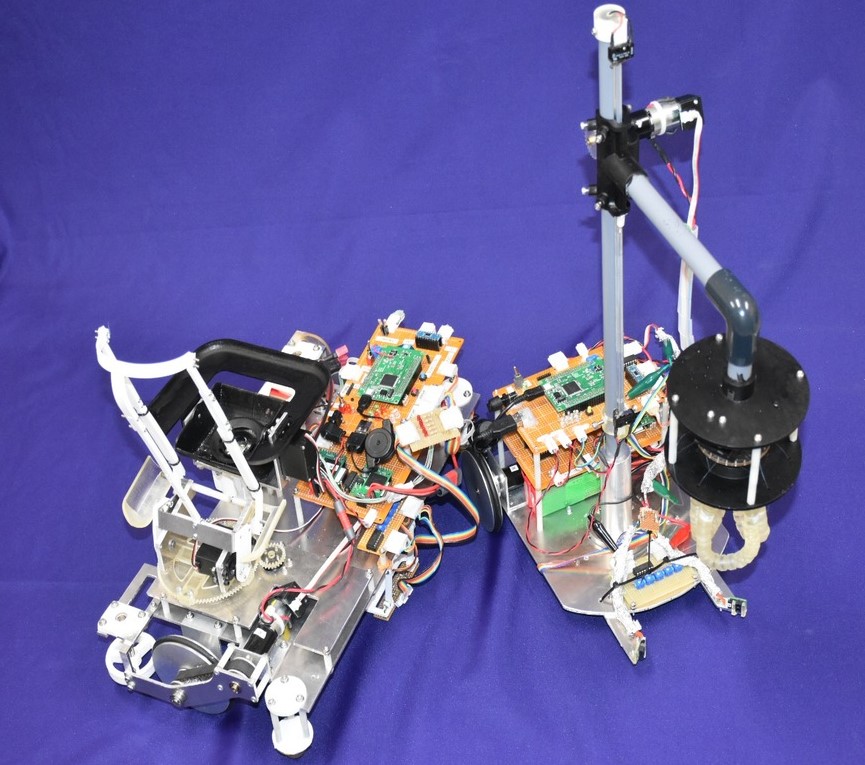
Multi-robots L:420mm * W:220mm * H:530mm, 2.14kg, 100mm/s Line-trace, Dead-reconing, Distance sensor, Sensors using lightwave, Co-operation, Hand, Appeals: ボールを一般的なアームではなく、特殊な形状をしたボールになじむよようなアームで把持することが可能です。 Characteristics: 2台のロボットを使用し、それぞれ、ボール把持ロボットとボール判別ロボットです。把持ロボットは、2つの距離センサを使用して、ボールを検知し、なじむ機構を用いて、ボールを把持します。判別ロボットはカラーセンサとサーボモータを使用して判別します。 |