| Self-content,
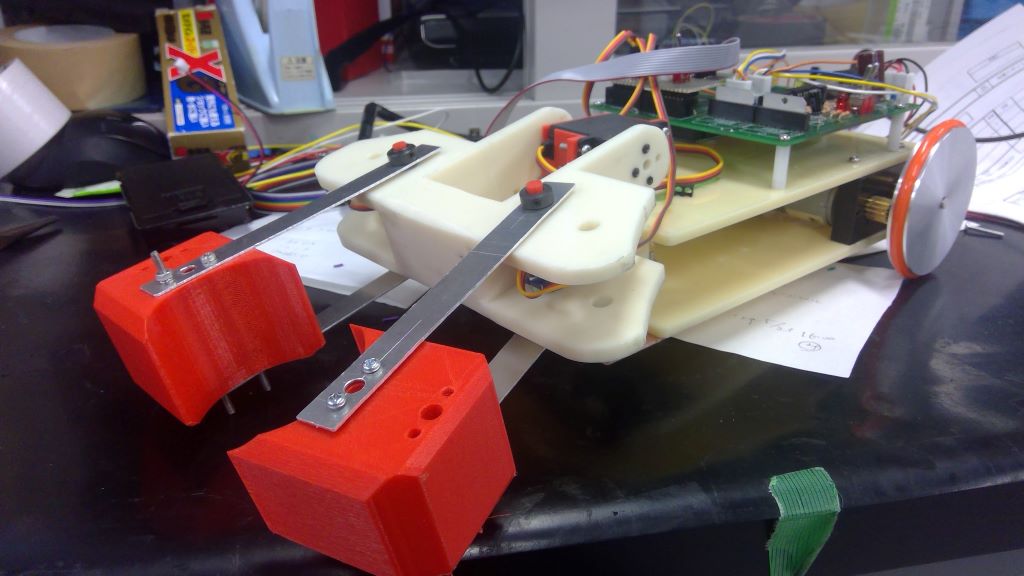
Single-robot L:39.5mm * W:12mm * H:13mm, 1.3kg, ---mm/s Line-trace, Dead-reconing, Distance sensor, Sensors using lightwave, Sensors using soundwave, Hand, Appeals: シンプル且つスピーディーに行ないます。 Characteristics: ボールを距離センサで見つけ、赤いアームで掴み、色センサで色ごとに分けていれる。 |