| Self-content,
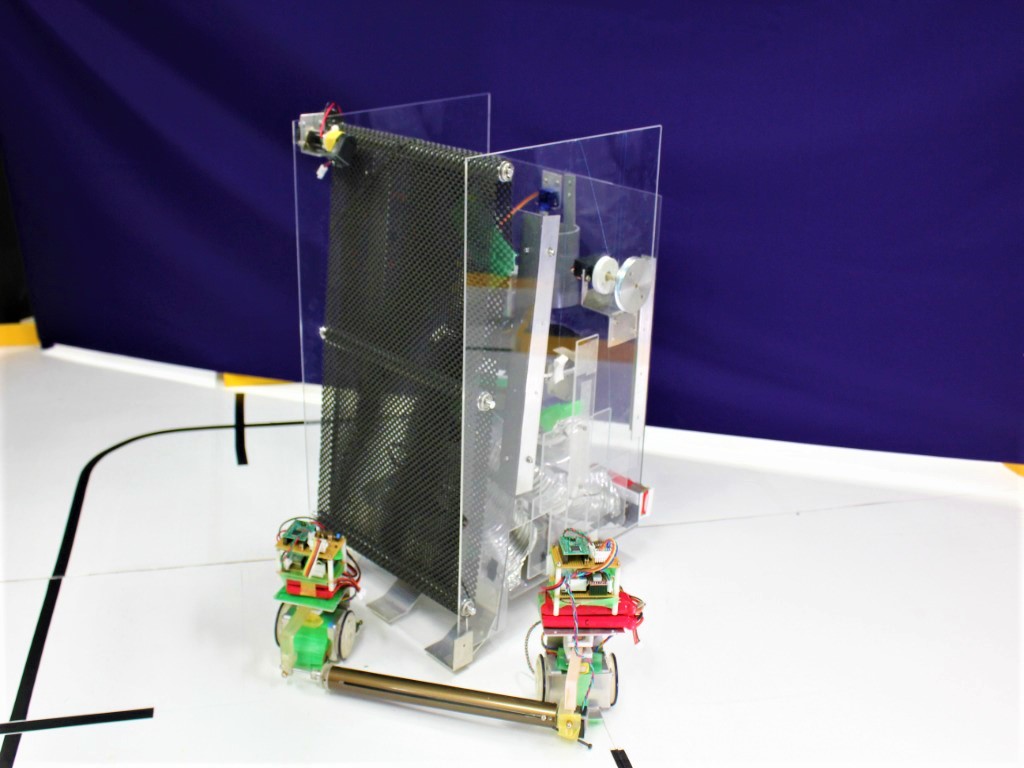
Multi-robots L:400mm * W:340mm * H:540mm, 7.5kg, 100mm/s Line-trace, Dead-reconing, Roller, Appeals: ボールをゴールに入れる際、1つのアクチュエータでボールをそれぞれのゴールに入れるためにワンウェイクラッチ2つとサーボモータを使用しました。 Characteristics: ロボットは大型が1台、ポールでつながっている小型の2台を使用します。小さい方2台がそれぞれマイクロスイッチで自己位置を確認しながら移動し、連携してボールを集めます。その後、大きい方でオドメトリを使用しながらローラで一気に回収し、色分けをします。その後、大きい方はラインセンサとオドメトリを使用して移動し、色ごとにゴールに入れるという動作をします。 |