MULTI 01
Team JPY
 |
Self-content,
Single-robot
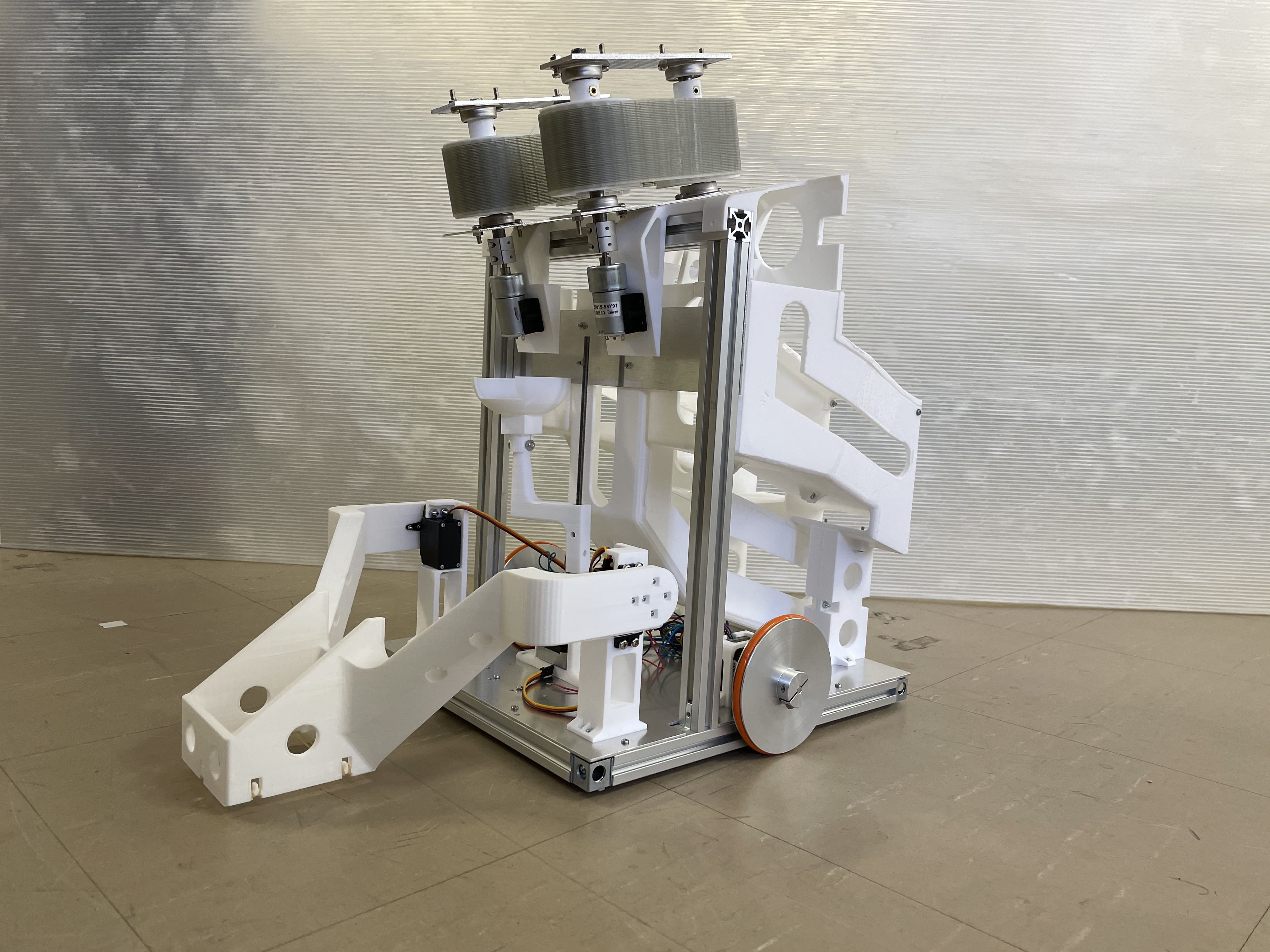
L:430mm * W:350mm * H:510mm,
7.5kg, 300mm/s
Line-trace,
Sensors using lightwave,
Appeals:
輪ゴムを使用することで、モータなしでボールを回収することが可能。ボールねじと同じ要領でお椀を上昇させる。蓋を回転させることで、三つの格納箱の蓋を一つにすることができた。
Characteristics:
ライントレースでコース上を移動し、ボールを回収。車体前方にあるベルトコンベアでボールを運んだ後、車体後方の三つの格納箱に色別に分類。円盤形の蓋を回転させ、ボールを排出する。
| |
Results
1st Pre.round Game: 0.00, Judge: ---, Compensation: ---, Sum.:0.00
Performance: --- Challenge: --- Art:--- Speed :---
Revival Game: 5.00, Judge: ---, Compensation: ---, Sum.:5.00
Performance: --- Challenge: --- Art:--- Speed :---
2nd Pre.round Game: 5.00, Judge: 31.34, Compensation: ---, Sum.:36.34
Performance: 12.00 Challenge: 6.67 Art:6.67 Speed :6.00