マルチ01(マルチ01)
チーム¥(チーム¥)
東北工業大学 藤田研究室
自立型,単独型
長430mm×幅350mm×高510mm, 重7.5kg, 速300mm/s
ライントレース,
光センサ,
アピール
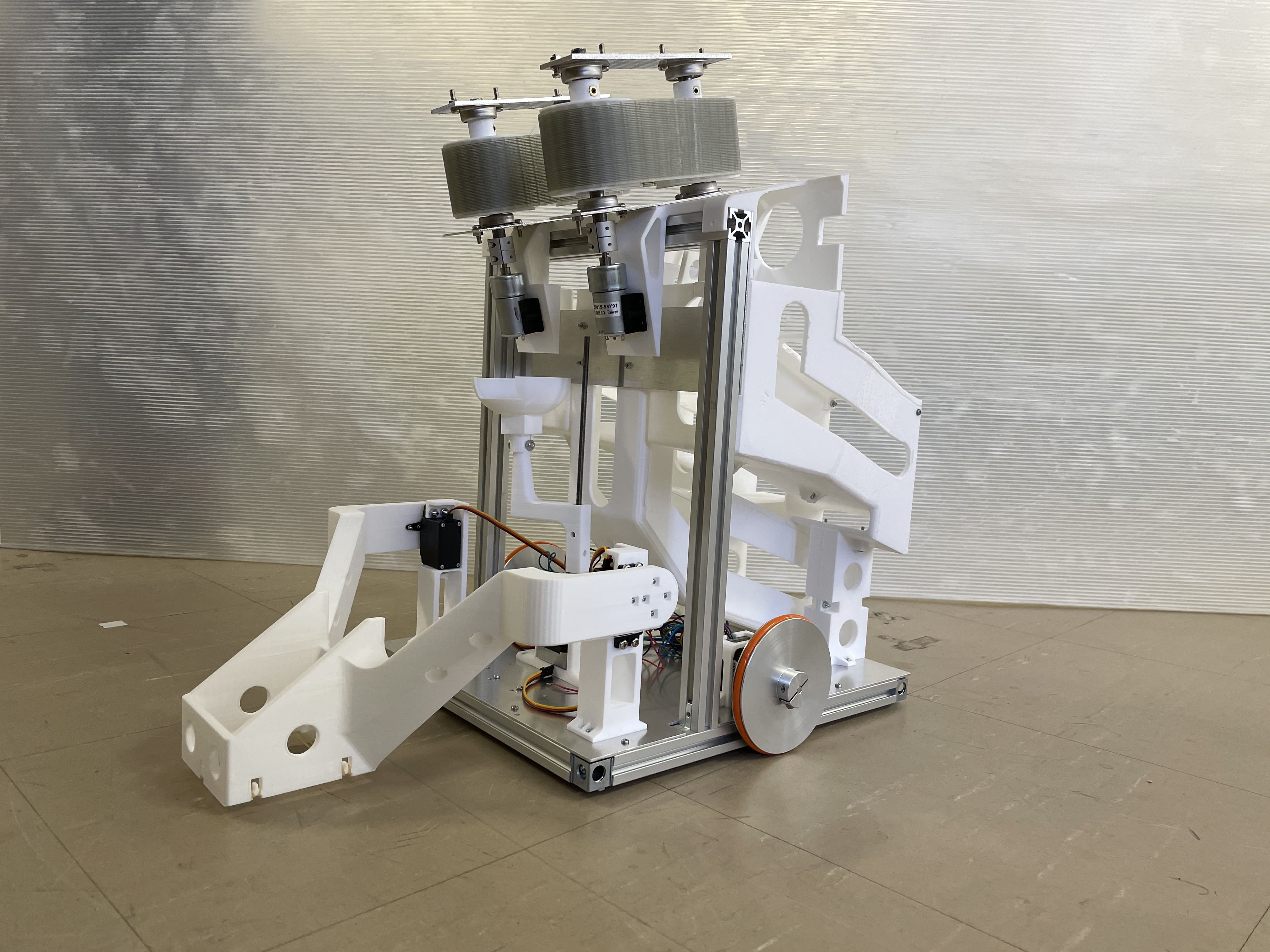
輪ゴムを使用することで、モータなしでボールを回収することが可能。ボールねじと同じ要領でお椀を上昇させる。蓋を回転させることで、三つの格納箱の蓋を一つにすることができた。
ロボットの特徴
ライントレースでコース上を移動し、ボールを回収。車体前方にあるベルトコンベアでボールを運んだ後、車体後方の三つの格納箱に色別に分類。円盤形の蓋を回転させ、ボールを排出する。
競技結果:
一次 競技点: 0.00 審査点: --- 補正: --- 合計:0.00 パ: --- チャ: --- 芸:--- 速:---
敗復 競技点: 5.00 審査点: --- 補正: --- 合計:5.00 パ: --- チャ: --- 芸:--- 速:---
二次 競技点: 5.00 審査点: 31.34 補正: --- 合計:36.34 パ: 12.00 チャ: 6.67 芸:6.67 速:6.00