ズゴックハンド(ズゴックハンド)
自由工房_三年生(自由工房_三年生)
大阪電気通信大学自由工房
自立型,単独型
長315mm×幅195mm×高340mm, 重2.9kg, 速30mm/s
ライントレース,
アピール
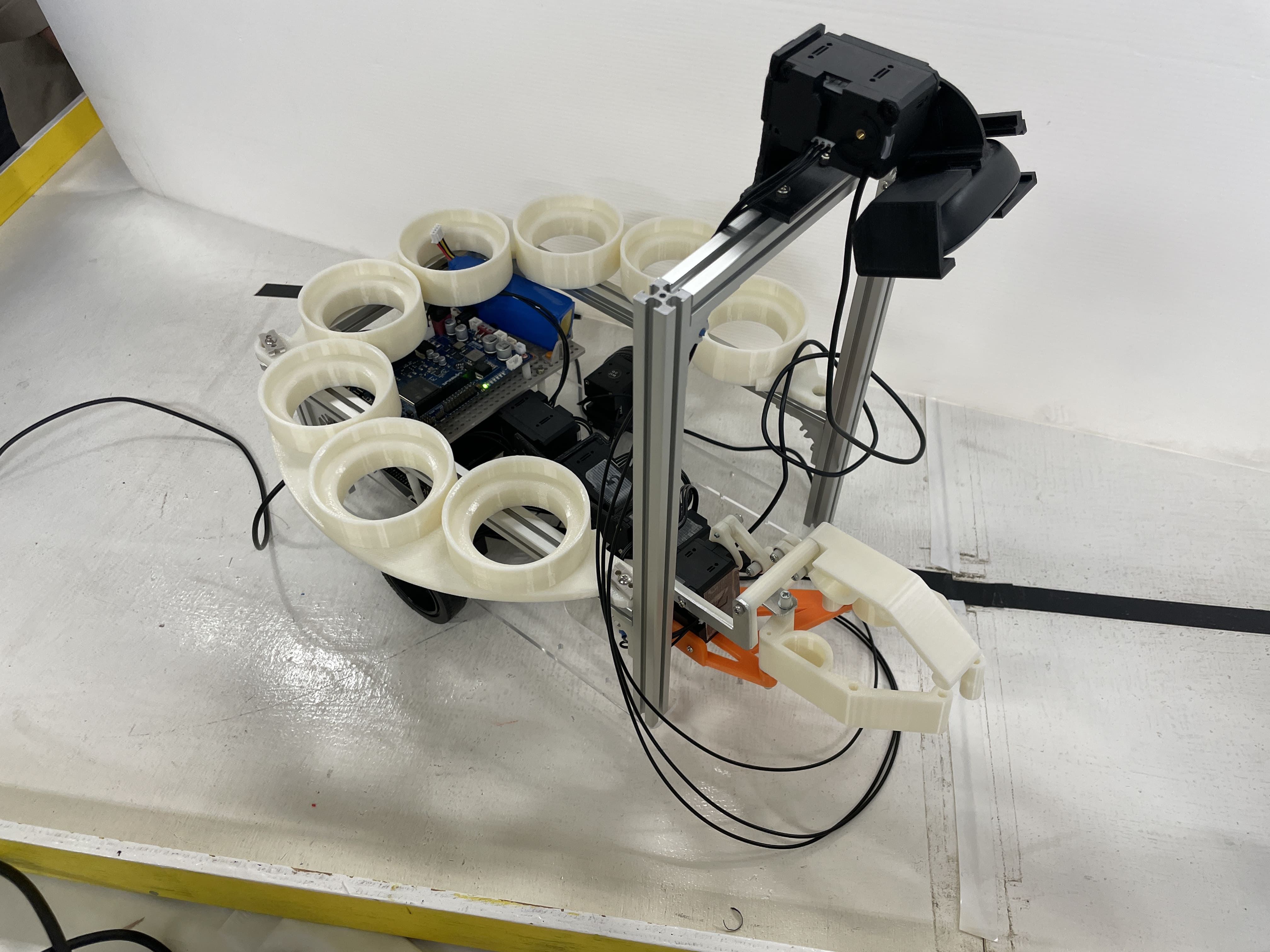
アームはリンク機構を用いて、一つのモーターで左右そして上方向のアームの稼働により、正確なボールの回収が行える
ロボットの特徴
まず画像処理を用いたライントレースによってボールが置かれている場所まで行き、画像認識によってボールを回収、排出まで行います。
競技結果:
一次 競技点: 5.00 審査点: --- 補正: --- 合計:5.00 パ: --- チャ: --- 芸:--- 速:---
敗復 競技点: 5.00 審査点: --- 補正: --- 合計:5.00 パ: --- チャ: --- 芸:--- 速:---