| Self-content,
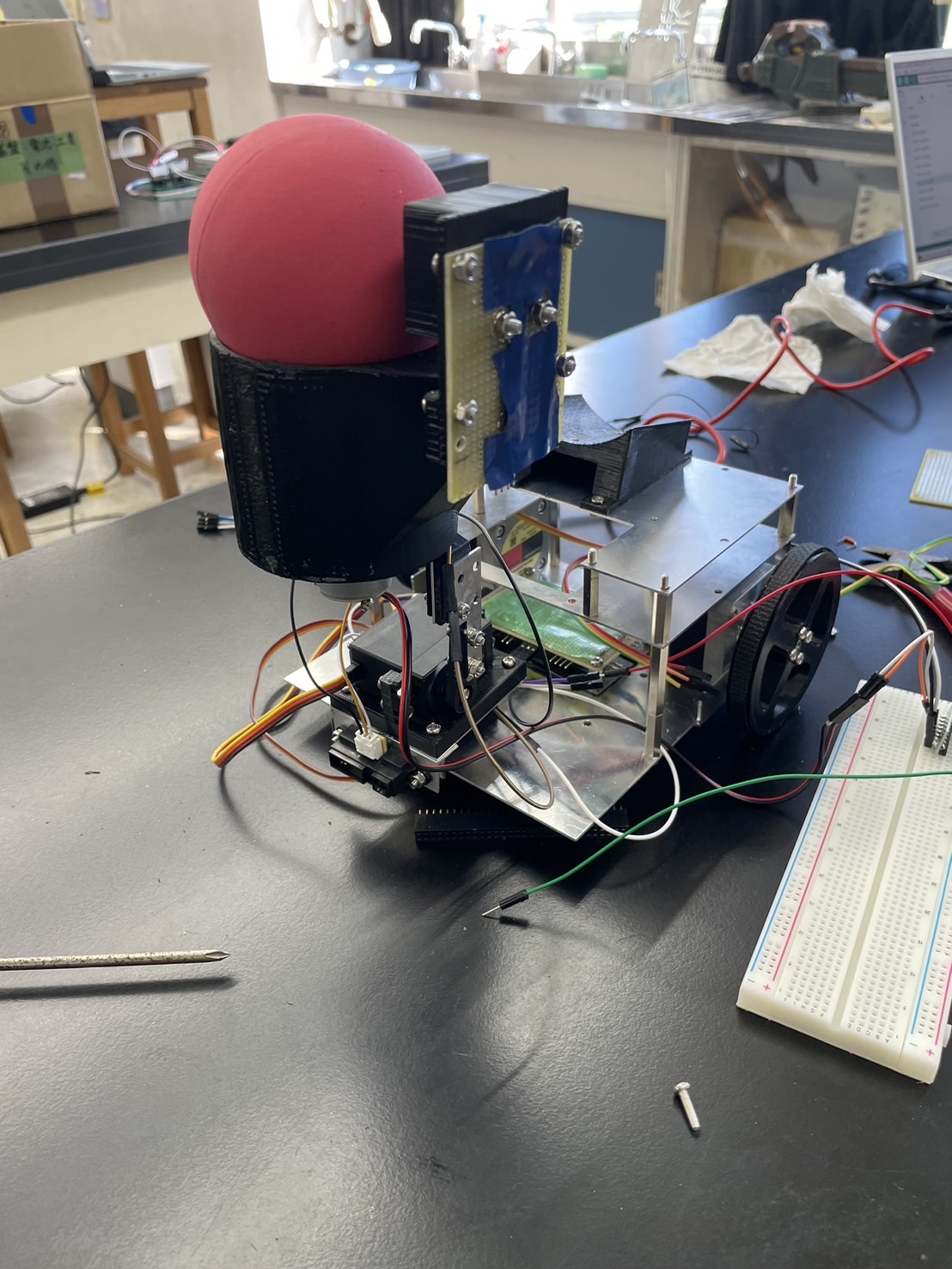
Single-robot L:220mm * W:190mm * H:240mm, 1.5kg, 30mm/s Line-trace, Sensors using lightwave, Wind, Appeals: 渋渋さんのロボットはボールを探す際に車体全体を動かしていましたが、私たちは渋渋の吸引を参考にしつつ吸引部だけを独自に駆動させることによって線から外れることなく安定した駆動をできるようにしました Characteristics: 吸引によって一つずつボールを運ぶようにしています。後述の通り探索の際に吸引部だけを駆動することで制御を簡単にしています |