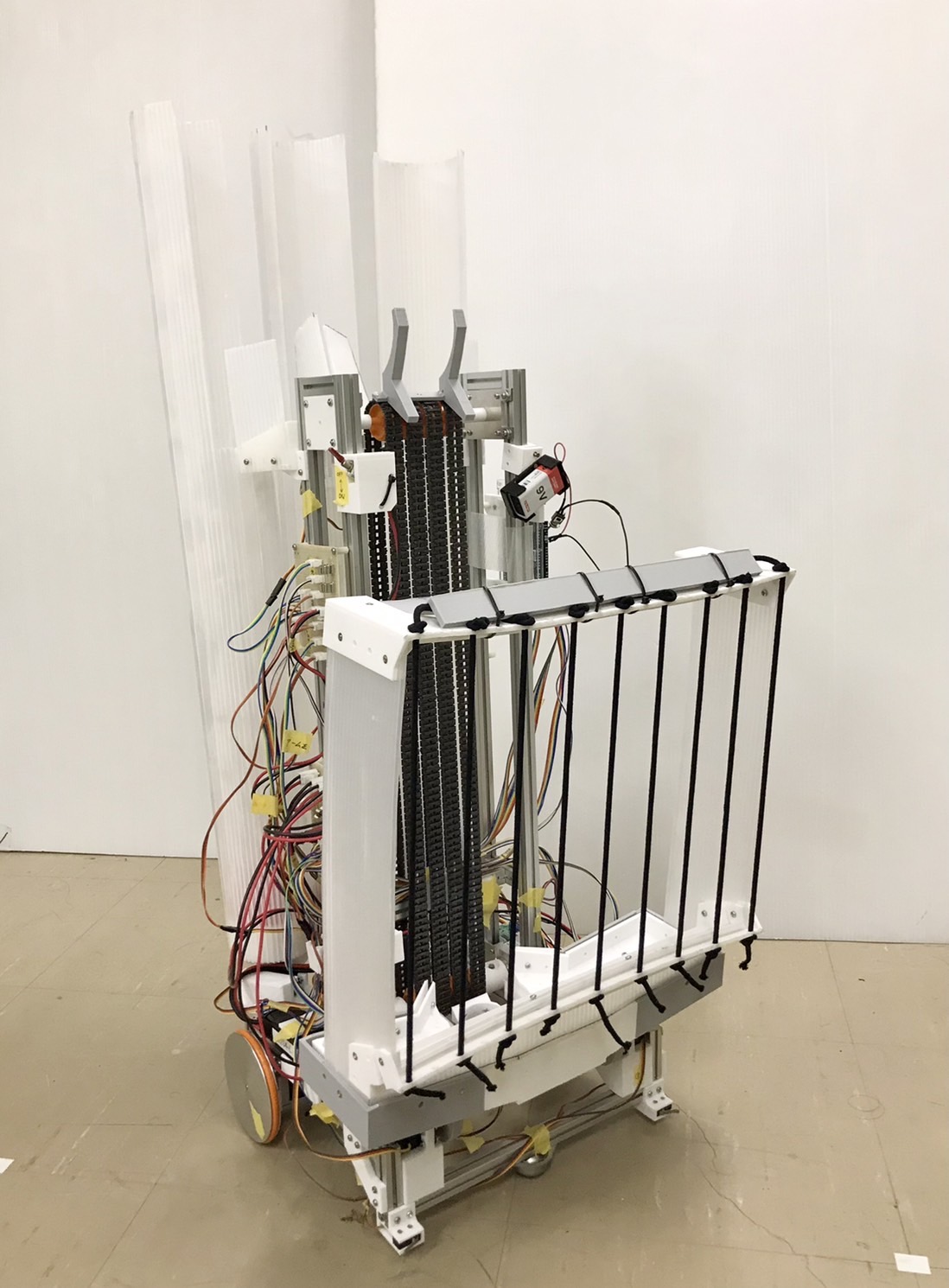
| 自立型,単独型 長370mm×幅314mm×高894mm, 重6.07kg, 速350mm/s デッドレコニング, 光センサ, アピール ボールエリアから直接ゴールさせること。ボールエリアは8分割され、そこに必ず1〜2個あることを想定してアームを作ったこと。ベルトコンベアでカラーボールを持ち上げる際にベルトコンベアを動かすステッピングモーター、仕分け機構を動かすサーボモーターの同時制御すること。ユーザー関数を用いてできるだけコンパクトに、整備性を良くしたこと。 ロボットの特徴 ボールエリアに移動した後エリアを8分割した1エリアに合わせてアームを下し、ボールを2個ずつ回収。カラーセンサーで色を読み取り、ベルトコンベアでボールを持ち上げ、色ごとに用意したカゴを仕分けする。すべてボールを回収した後中央の段差を挟んで黄色のゴールのへ移動し、各ボールを同時に流し込む。 |