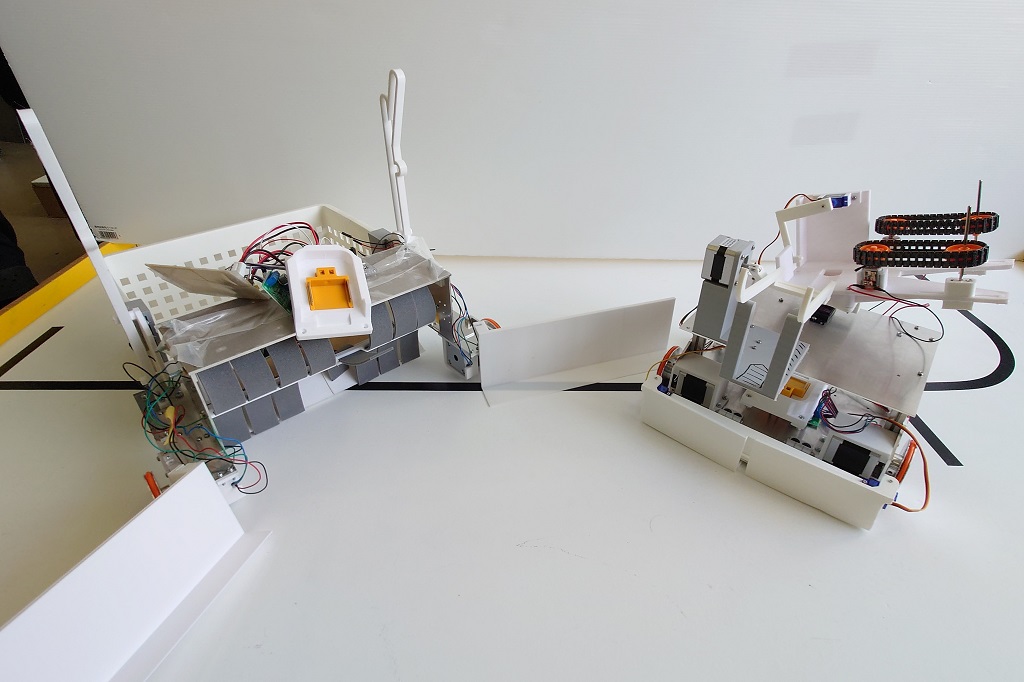
| 自立型,複数型 長445mm×幅445mm×高380mm, 重7.3kg, 速120mm/s デッドレコニング, 距離センサ, 光センサ, 協調動作, ローラ, アピール 2つのロボットで、ボールエリアを挟み込むようにアームを展開し全回収を行います。その際、赤外線で両機体が協調して動作します。 また、2つのロボットを初期姿勢のサイズに収めるためアームの展開方法を工夫しました。 ロボットの特徴 2つのロボットについているDCギアモーターやサーボモーターを用いて、ボールエリアを覆うようにアームを展開しエリア内のボールを全て回収する。回収する際には、一方のロボットについている柔らかい羽が付いたパーツをDCギアモーターで回転させ、ボールをからめとるようにしてその後方にあるカゴに格納する。 格納したボールは、もう一方のロボットについているアームで回転させることで取り出し、撃ち出す台に流し込む。台にあるカラーセンサーによって打ち出す角度を調整し、ゴールに向かって撃ち出す。 |