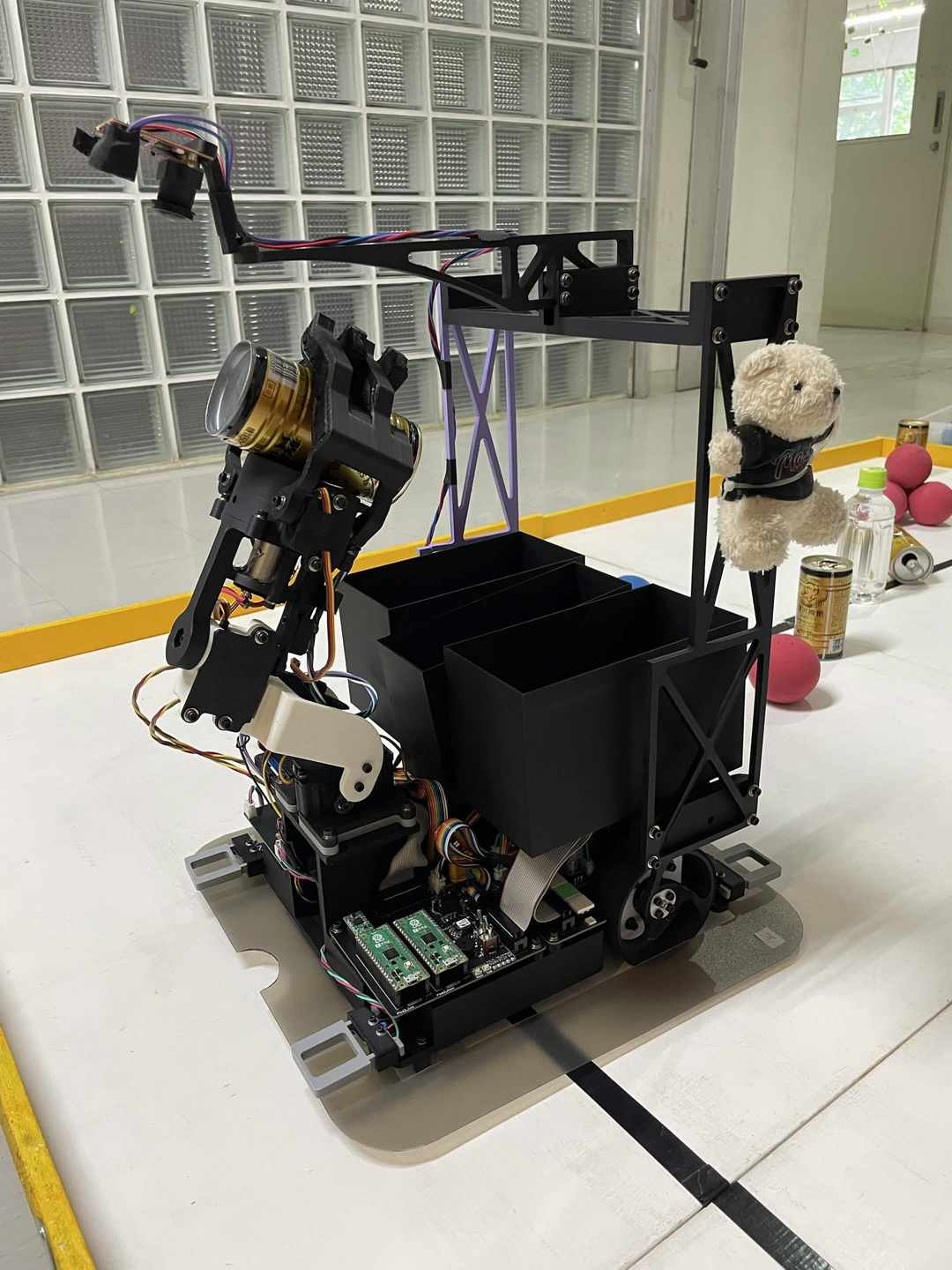
| 自立型,単独型 長340mm×幅330mm×高500mm, 重2.83kg, 速500mm/s ライントレース, 距離センサ, ビジョンセンサ, 光センサ, ハンド, 風, アピール 多種多量のセンサーを搭載することで、プログラムを書きやすいロボットに仕上げました。 ロボットの特徴 本機体は、競技において満点獲得を確実にすることを目的として設計した中型機(約300mm×300mm)です。回収物を一時的に収納する方式を採用し、競技時間の有効活用を図っています。 最も特徴的な機構は多関節アームです。アームは、先端の指関節、中間の左右関節、根元の上下関節からなる3自由度構成となっており、柔軟な把持動作が可能です。指部には厚いスポンジを装着し、ボールピラミッドを除く対象物を安定して把持できるよう設計しました。特に、向きが不定な横向きの缶にも対応できるよう、指形状を最適化しています。ボールの捕獲には吸引ファンを用い、位置や距離に多少のずれがあっても確実に回収できます。 回収した対象物は、吸引機構内のカラーセンサによって識別されます。その後、赤ボール、青ボール、縦缶用に分けられた3つの独立したかごへ振り分けられます。アームの左右関節を用いることで、投入先を適切に選択することが可能です。 対象物の検知にはカメラとToFセンサを併用しています。カメラは機体上部に俯角をつけて配置し、広い視野を確保しながら距離と角度を測定します。また、缶と壁の識別精度を向上させる配置としています。検知後は対象物へ旋回し、ToFセンサにより距離を高精度に測定したうえで、アームにより回収を行います。 走行制御にはラインセンサ、ジャイロセンサ、タッチセンサを使用しています。ラインセンサは中央の円形20素子と前方3素子の計23素子で構成され、ライントレース、交差点検知、開始線検知を担います。ジャイロセンサは旋回時の姿勢制御に用い、タッチセンサと併用した壁当てにより位置および角度の補正を行います。さらに、車体下部にスカートを設けることで、ボールへの乗り上げによるスタックを防止しています。 |